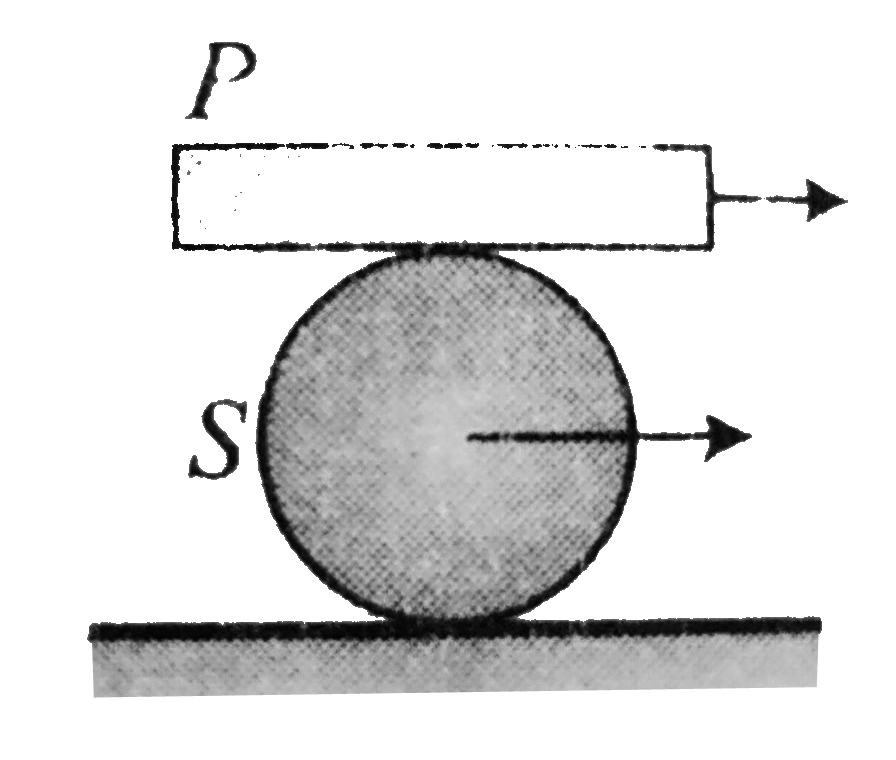
A plank `P` is placed on a solid cylinder `S`, which rolls on a horizontal surface. The two are of equal mass. There is no slipping at any of the surfaces in contact. The ratio of kinetic energy of `P` to the kinetic energy of `S` is:
A
`1:1`
B
`2:1`
C
`8:3`
D
`11:8`
Text Solution
Verified by Experts
The correct Answer is:
C
Topper's Solved these Questions
PRACTICE WORKSHEET 3
D MUKHERJEE|Exercise Assertion- Reason Type|3 Videos
PRACTICE WORKSHEET 3
D MUKHERJEE|Exercise Linked- Comprehension Type|3 Videos
PRACTICE WORKSHEET 2
D MUKHERJEE|Exercise Linked- Comprehension Type|4 Videos
PROPERTIES OF MATTER,FLUIDS
D MUKHERJEE|Exercise Type 2|35 Videos
Similar Questions
Explore conceptually related problems
A hollow sphere rolls without slipping on plane surface. The ratio of kinetic energy of rotation to the total kinetic energy is
A hollow sphere is rolling without slipping on a rough surface. The ratio of translational kinetic energy to rotational kinetic energy is
In the figure shown mass of both, the spherical body and block is m . Moment of inertia of the spherical body about centre of mass is 2mR^(2) . The spherical body rolls on the horizontal surface. There is no slipping at any surfaces in contact. The ratio of kinetic energy of the spherical body to that of block is
A sphere is rolling down an inclined plane without slipping. The ratio of rotational kinetic energy to total kinetic energy is
When a solid sphere rolls without slipping on a surface, its rotational kinetic energy is 40 J. Then its total kinetic energy is
When a sphere rolls without slipping the ratio of its kinetic energy of translation to its total kinetic energy is.
When a solid cylinder rolls without slipping the ratio of kinetic energy of translation to its total kinetic energy is
A ring is rolling without slipping. The ratio of translational kinetic energy to rotational kinetic energy is
A solid sphere is rolling without slipping on a horizontal plane. The ratio of its rotational kinetic energy and translational kinetic energy is
D MUKHERJEE-PRACTICE WORKSHEET 3-Matrix-Matching Type