We are given the job of designing a large horizontal ring that will rotate around a vertical axis and that will have a radius of r = 33.1 m. Passengers will enter through a door in the outer wall of the ring and then stand next to that wall. We decide that for the time interval t = 0 to t = 2.30 s, the angular position `theta(t)` of a reference line on the ring will be given by
`theta=ct^(3)`,
with `c=6.39xx10^(-2)rad//s^(3)`. After t = 2.30 s, the angular speed will be held constant until the end of the ride. Once the ring begins to rotate, the floor of the ring will drop away from the riders but the riders will not fall - indeed, they feel as though they are pinned to the wall. For the time t = 2.20 s, let's determine a rider's angular speed `omega`, linear speed `nu`, angular acceleration `alpha`, tangential acceleration `a_(t)`, radial acceleration `a_(r)`, and acceleration `veca`.
We are given the job of designing a large horizontal ring that will rotate around a vertical axis and that will have a radius of r = 33.1 m. Passengers will enter through a door in the outer wall of the ring and then stand next to that wall. We decide that for the time interval t = 0 to t = 2.30 s, the angular position `theta(t)` of a reference line on the ring will be given by
`theta=ct^(3)`,
with `c=6.39xx10^(-2)rad//s^(3)`. After t = 2.30 s, the angular speed will be held constant until the end of the ride. Once the ring begins to rotate, the floor of the ring will drop away from the riders but the riders will not fall - indeed, they feel as though they are pinned to the wall. For the time t = 2.20 s, let's determine a rider's angular speed `omega`, linear speed `nu`, angular acceleration `alpha`, tangential acceleration `a_(t)`, radial acceleration `a_(r)`, and acceleration `veca`.
`theta=ct^(3)`,
with `c=6.39xx10^(-2)rad//s^(3)`. After t = 2.30 s, the angular speed will be held constant until the end of the ride. Once the ring begins to rotate, the floor of the ring will drop away from the riders but the riders will not fall - indeed, they feel as though they are pinned to the wall. For the time t = 2.20 s, let's determine a rider's angular speed `omega`, linear speed `nu`, angular acceleration `alpha`, tangential acceleration `a_(t)`, radial acceleration `a_(r)`, and acceleration `veca`.
Text Solution
Verified by Experts
(1) The angular speed `omega` is given by Eq. `(omega=d theta//dt)`. (2) The linear speed `nu` (along the circular path) is related to the angular speed (around the rotation axis) by Eq. `(nu=omegar)`. (3) The angular acceleration `alpha` is given by Eq. `(alpha=domega//dt)`. (4) The tangential acceleration `a_(t)` (along the circular path) is related to the angular acceleration (around the rotation axis) by Eq. `(a_(t)=alphar)`. (5) The radial acceleration `a_(r)` is given Eq. `(a_(r)=omega^(2)r)`. (6) The tangential and radial accelerations are the (perpendicular) components of the (full) acceleration `veca`.
Calculations: Let.s go through the steps. We first find the angular velocity by taking the time derivative of the given angular position function and then substituting the given time of t = 2.20 s:
`omega=(d theta)/(dt)=d/dt(ct^(3))=3ct^(2)`
= `3(6.39xx10^(-2)rad//s^(3))(2.20s)^(2)`
= 0.928 rad/s.
the linear speed just then is
`nu=omegar=3ct^(2)r`
= `3(6.39xx10^(-2)rad//s^(3))(2.20s)^(2)(33.1m)`
= 30.7 m/s.
Next, let.s tackle the angular acceleration by taking the time derivative of Eq.
`alpha=(domega)/(dt)=d/dt(3ct^(2))=6ct`
= `6(6.39xx10^(-2)rad//s^(3))(2.20s)=0.843rad//s^(2)`.
The tangential acceleration then follows from Eq.
`a_(1)=alphar=6ctr`
= `6(6.30xx10^(-2)rad//s^(3))(2.20s)^(2)(33.1m)`
= `27.91m//s^(2)~~27.9m//s^(2)`.
or 2.8 g Eq. tells us that the tangential acceleration is increasing with time (but it will cut off at t = 2.30 s). From Eq, we write the radial acceleration as
`a_(r)=omega^(2)r`.
Substituting from Eq. leads us to
`a_(r)=(3ct^(2))^(2)r=9c^(2)t^(4)r`
= `9(6.39xx10^(-2)rad//s^(3))^(2)(2.20s)^(4)(33.1m)`
= `28.49m//s^(2)~~28.5m//s^(2)`,
or 2.9 g (which is also reasonable and a bit exciting).
The radial and tangential accelerations are perpendicular to each other and form the components of the rider.s acceleration `veca`. The magnitude of `veca` is given by
`a=sqrt(a_(r)^(2)+a_(t)^(2))`
= `sqrt((28.49m//s^(2))^(2)+(27.91m//s^(2))^(2))`
`~~39.9m//s^(2)`.
or 4.1 g (which is really exciting). All these values are acceptable.
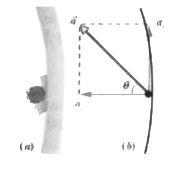
To find the orientation of `veca`, we can calculate the angle `theta` shown in Fig.
`tantheta=a_(t)/a_(r)`.
However, instead of substituting our numerical results, let.s use the algebraic results from Eq.
`theta=tan^(-1)((6ctr)/(9c^(2)t^(4)r))=tan^(-1)(2/(3ct^(3)))`.
The big advantage of solving for the angle algebraically is that we can then see that the angle (1) does not depend on the ring.s radius and (2) decreases as t goes from 0 to 2.20 s. That is, the acceleration vector `veca` swings toward being radially inward because the radial acceleration (which depends on `t^(4)`) quickly dominates over the tangential acceleration (which depends on only t). At our given time t = 2.20 s, we have
`theta="tan"^(-1)2/(3(6.39xx10^(-2)rad//s^(3))(2.20s)^(3))=44.4^(@)`.
Calculations: Let.s go through the steps. We first find the angular velocity by taking the time derivative of the given angular position function and then substituting the given time of t = 2.20 s:
`omega=(d theta)/(dt)=d/dt(ct^(3))=3ct^(2)`
= `3(6.39xx10^(-2)rad//s^(3))(2.20s)^(2)`
= 0.928 rad/s.
the linear speed just then is
`nu=omegar=3ct^(2)r`
= `3(6.39xx10^(-2)rad//s^(3))(2.20s)^(2)(33.1m)`
= 30.7 m/s.
Next, let.s tackle the angular acceleration by taking the time derivative of Eq.
`alpha=(domega)/(dt)=d/dt(3ct^(2))=6ct`
= `6(6.39xx10^(-2)rad//s^(3))(2.20s)=0.843rad//s^(2)`.
The tangential acceleration then follows from Eq.
`a_(1)=alphar=6ctr`
= `6(6.30xx10^(-2)rad//s^(3))(2.20s)^(2)(33.1m)`
= `27.91m//s^(2)~~27.9m//s^(2)`.
or 2.8 g Eq. tells us that the tangential acceleration is increasing with time (but it will cut off at t = 2.30 s). From Eq, we write the radial acceleration as
`a_(r)=omega^(2)r`.
Substituting from Eq. leads us to
`a_(r)=(3ct^(2))^(2)r=9c^(2)t^(4)r`
= `9(6.39xx10^(-2)rad//s^(3))^(2)(2.20s)^(4)(33.1m)`
= `28.49m//s^(2)~~28.5m//s^(2)`,
or 2.9 g (which is also reasonable and a bit exciting).
The radial and tangential accelerations are perpendicular to each other and form the components of the rider.s acceleration `veca`. The magnitude of `veca` is given by
`a=sqrt(a_(r)^(2)+a_(t)^(2))`
= `sqrt((28.49m//s^(2))^(2)+(27.91m//s^(2))^(2))`
`~~39.9m//s^(2)`.
or 4.1 g (which is really exciting). All these values are acceptable.
To find the orientation of `veca`, we can calculate the angle `theta` shown in Fig.
`tantheta=a_(t)/a_(r)`.
However, instead of substituting our numerical results, let.s use the algebraic results from Eq.
`theta=tan^(-1)((6ctr)/(9c^(2)t^(4)r))=tan^(-1)(2/(3ct^(3)))`.
The big advantage of solving for the angle algebraically is that we can then see that the angle (1) does not depend on the ring.s radius and (2) decreases as t goes from 0 to 2.20 s. That is, the acceleration vector `veca` swings toward being radially inward because the radial acceleration (which depends on `t^(4)`) quickly dominates over the tangential acceleration (which depends on only t). At our given time t = 2.20 s, we have
`theta="tan"^(-1)2/(3(6.39xx10^(-2)rad//s^(3))(2.20s)^(3))=44.4^(@)`.



Topper's Solved these Questions
RIGID BODY DYNAMICS - I
RESNICK AND HALLIDAY|Exercise CHECKPOINT|18 VideosRIGID BODY DYNAMICS - I
RESNICK AND HALLIDAY|Exercise PROBLEMS|100 VideosRELATIVITY
RESNICK AND HALLIDAY|Exercise PRACTICE QUESTIONS (Integer Type)|5 VideosRIGID BODY DYNAMICS-II
RESNICK AND HALLIDAY|Exercise PRACTICE QUESTIONS (Integer Type)|2 Videos
Similar Questions
Explore conceptually related problems
The angular position of a swinging door is described by theta=5+10t+20t^(2) . Determine the angular position, angular speed and angular acceleration at t=2 s .
A wheel rotates around a stationary axis so that the rotation angle theta varies with time as theta=2t^(2) radian. Find the total acceleration of the point A at the rim at the moment t=0.5 s If the radius of wheel is 1 m .
The angular position of a point on the rim of a rotating wheel is given by theta=4t^(3)-2t^(2)+5t+3 rad. Find (a) the angular velocity at t=1 s , (b) the angular acceleration at t=2 s . (c ) the average angular velocity in time interval t=0 to t=2 s and (d) the average angular acceleration in time interval t=1 to t=3 s .
The position of a body moving along x-axis at time t is given by x= (t^(2)-4t+6)m . The distance travelled by body in time interval t = 0 to t = 3 s is
The instantaneous angular position of a point on a rotating wheel is given by the equation theta(t) = 2t^(3) - 6 t^(2) The torque on the wheel becomes zero at
A horizontal disc rotates freely about a vertical axis through its centre. A ring, having the same mass and radius as the disc, is now gently placed on the disc. After some time, the two rotate with a common angular velocity, then
A charge q is placed at the point P as shown in figure on the axis of the ring of elemental thickness 't' and radius R then flux through the ring is :-
A ring of radius r is rotating about a vertical axis along its diameter with constant angular velocity omega.A read of mass m remains at rest w.r.t. ring at the position shown in figure. Then w^(2) is:
Angular position theta of a particle moving on a curvilinear path varies according to the equation theta=t^(3)-3t^(2)+4t-2 , where theta is in radians and time t is in seconds. What is its average angular acceleration in the time interval t=2s to t=4s ?
RESNICK AND HALLIDAY-RIGID BODY DYNAMICS - I-PRACTICE QUESTIONS (INTEGER TYPE))
- We are given the job of designing a large horizontal ring that will ro...
Text Solution
|
- Four solid sphereas each of diameter sqrt(5) cm and mass 0.5 kg are pl...
Text Solution
|
- A point mass is tied to one end of a cord whose other end passes throu...
Text Solution
|
- Two small bals A and B, each of mass m, are joined rigidlyl by a light...
Text Solution
|