Text Solution
Verified by Experts



Topper's Solved these Questions
RIGID BODY DYNAMICS - I
RESNICK AND HALLIDAY|Exercise CHECKPOINT|18 VideosRIGID BODY DYNAMICS - I
RESNICK AND HALLIDAY|Exercise PROBLEMS|100 VideosRELATIVITY
RESNICK AND HALLIDAY|Exercise PRACTICE QUESTIONS (Integer Type)|5 VideosRIGID BODY DYNAMICS-II
RESNICK AND HALLIDAY|Exercise PRACTICE QUESTIONS (Integer Type)|2 Videos
RESNICK AND HALLIDAY-RIGID BODY DYNAMICS - I-PRACTICE QUESTIONS (INTEGER TYPE))
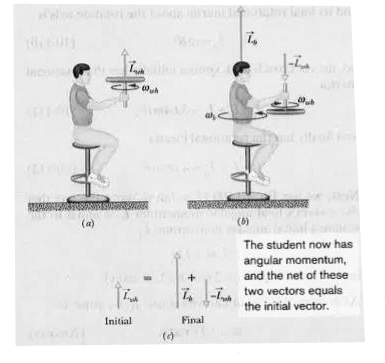
- Figure shows a student, again sitting on a stool that can rotate freel...
Text Solution
|
- Four solid sphereas each of diameter sqrt(5) cm and mass 0.5 kg are pl...
Text Solution
|
- A point mass is tied to one end of a cord whose other end passes throu...
Text Solution
|
- Two small bals A and B, each of mass m, are joined rigidlyl by a light...
Text Solution
|