Just as the moment of a force is the rotational analogue of force, the quantity angular momentum is the rotational analogue of linear momentum.
In figure, Q is a particle of mass m, having position vector `vec(OQ)=vecr` in Cartesian co-ordinate system.
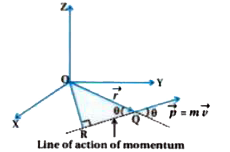
`vecv` is the linear velocity of the particle. So its linear momentum is `vecpvec(m_(v))`.
Here it is not necessary that the particle Q should be of a rigid body and it should move over a curved path.
Let the angle between `vecr and vecp` be `theta`.
The vector product or `vecr and vecp` is defined as the angular momentum `vecl` of the particle w.r.t. point O.
`therefore vecl=vecrxxvecp" ".......(1)`
Unit of angular momentum is `kg-m^(2)s^(-1)` or J.S and dimensional is `[M^(1)L^(2)T^(-1)]`
The magnitude of `vecl` depends on the selection of the reference point and so while defining the angular momentum of a particle it is necessary to mention the reference point.
The direction of `vecl` can be obtained with the help of right handed screw rule. Here `vecl` is in OZ direction.
Now `vecl=vecrxxvecp`.
`therefore |vecl|=rp sintheta=p[rsintheta]=p[OR]`
`therefore` Angular momentum of a particle = (magnitude of linear momentum `xx` (the perpendicular distance) of linear momentum (vector) from the reference point.
This relation also be written as under
`l=r(psintheta)orl=(rsintheta)p`
`l=rp_(_|_)or l=r_(_|_)p`
where `r_(_|_)=rsintheta`, it is perpendicular distance from origin to line of action of `vecp and p_(_|_)=psintheta` is the velocity component of momentum perpendicular to the position vector.


