(a,b) For rolling motion, the velocity of the point of contact
with respect to the surface should be zero. For this
`3Romega(-hati)|vecv_0 = 0 :. vecv_0 = 3Romegahati`
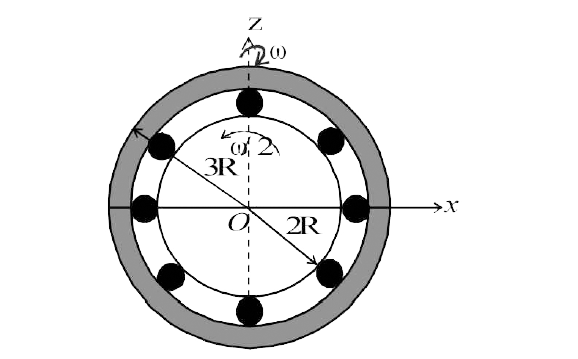
A shown in the figure, the point P will have two
velocities
(i) `3Romegahati` (due to translational motion)
(ii) `(R )/(2) omega` making an angle fo `30^@` with the vertical due
to rotation
`:. rarrup = [3R_omega hati - (R_oemga)/(4) hati]+(sqrt3R_omega)/(4) hatk`
`= (11)/(4) R_omega hati+ (sqrt3)/(4) R_omega hatk.`


