The observer, let us suppose is on the accelerated
frame. Therefore a pseudo force ma is applied individally
on each disc on the centre of mass. The firctional force is
acting in the + X direction which is producing an angular
acceleration `alpha.`
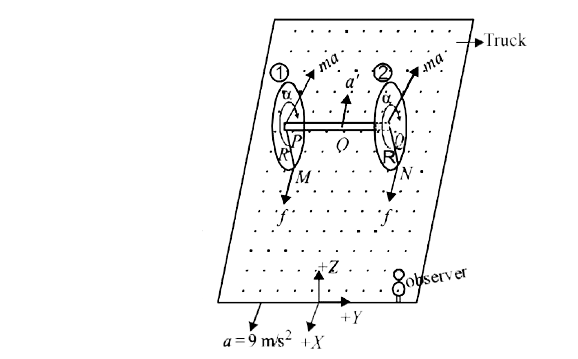
The torque acting on the
disc is
`tau = I alpah = fxxR`
`rArr f = (Ialpha)/(R ) ...(i)`
Let a' is the acceleration of
c.m. of the disc as seen by
the observer. Since the
case is of pure rolling and
from the perpective of the
observer
`a = alphaR ....(ii)`
`rArr (from (i) and (ii)`
`f = (Ia')/(R^2) ....(iii)`
Applying Newton's law for motion in X-direction
ma -f = ma'
`rArr a' = ((a - (f)/(m)) .....(iv)`
Also moment of inertia
`I= (1)/(2)mR^2 ....(v)`
From (iii), (iv) and (v)
`f=(1)/(2) (mR^2((a-(f)/(m))/(R^2) rArr 2f = ma-f`
`rArr 3f = ma rArr f= (ma)/(3) = (2xx9)/(3) = 6N (In + X direction)
`vecf = (6hati)N`
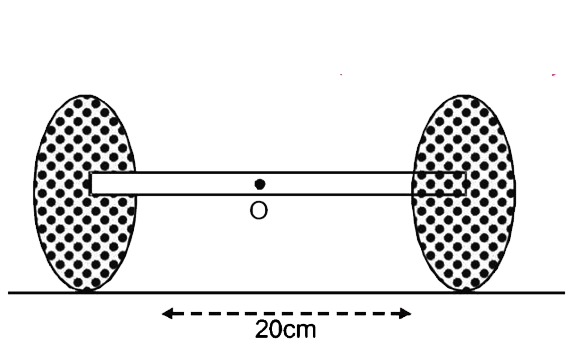
(ii) the positon vector fo point M, taking O as the origin
`vecr_m = -0.1vetj - 0.1hatk and position vector of point N`
`vecr_N = 0.1hatj - 0.1 hatk`
The torque due to friction on disc 1 about O
`vectau_1 = vecr_M xxvecf = (-0.1hatj - 0.1hatk)xx(6hati)`
`=0.6(hatk - hatj) N-m`
The torque due to friction on disc 2 about O
`vectau_2 = vecr_m xx vecf = (-0.1hatj - 0.1 hatk)xx(6hati)`
`=0.6(-hatj - hatk) N-m`
the magnitude of torque on each disc
`|tau_1| = |tau_2| = 0.6sqrt2 N_m`