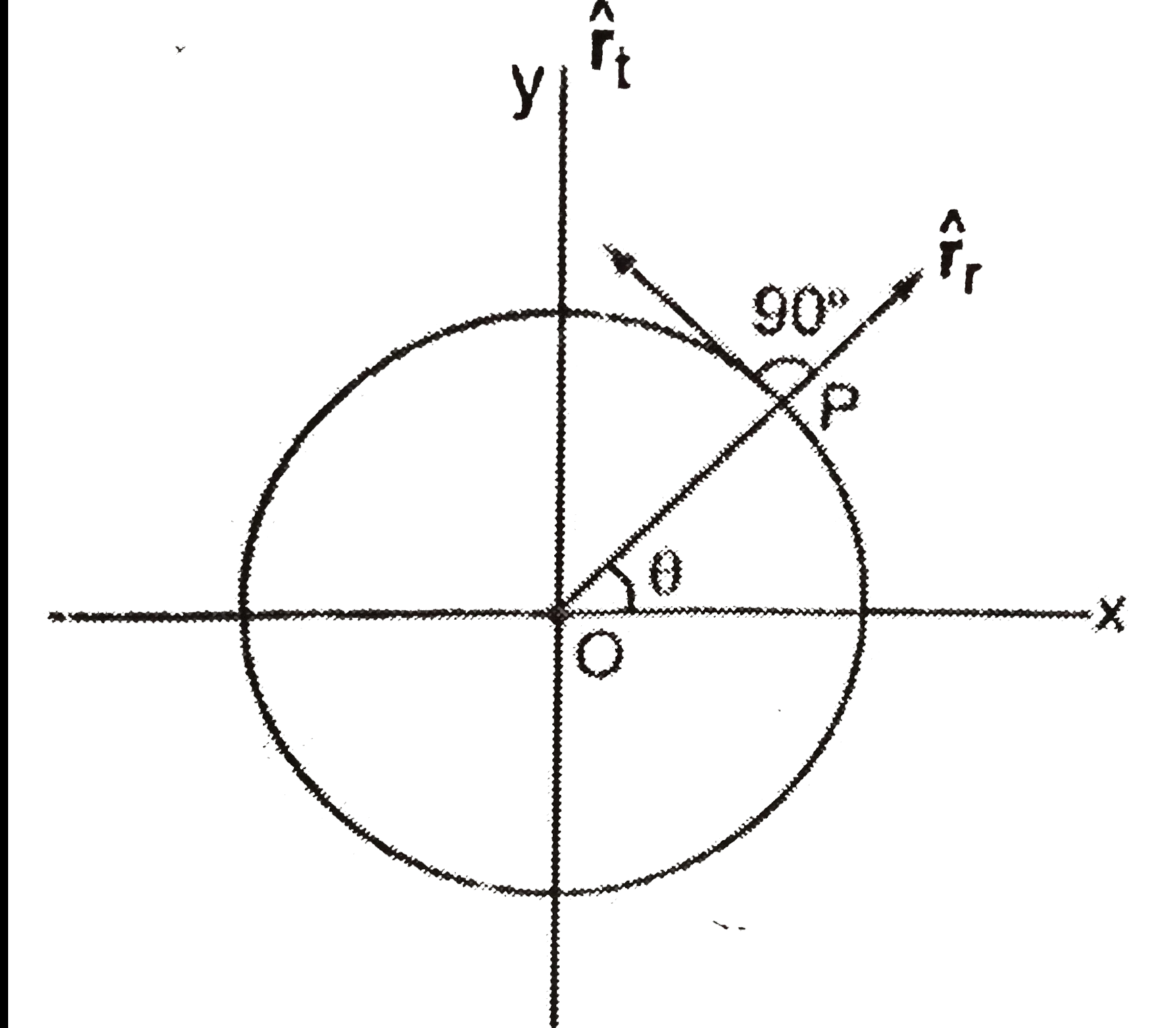
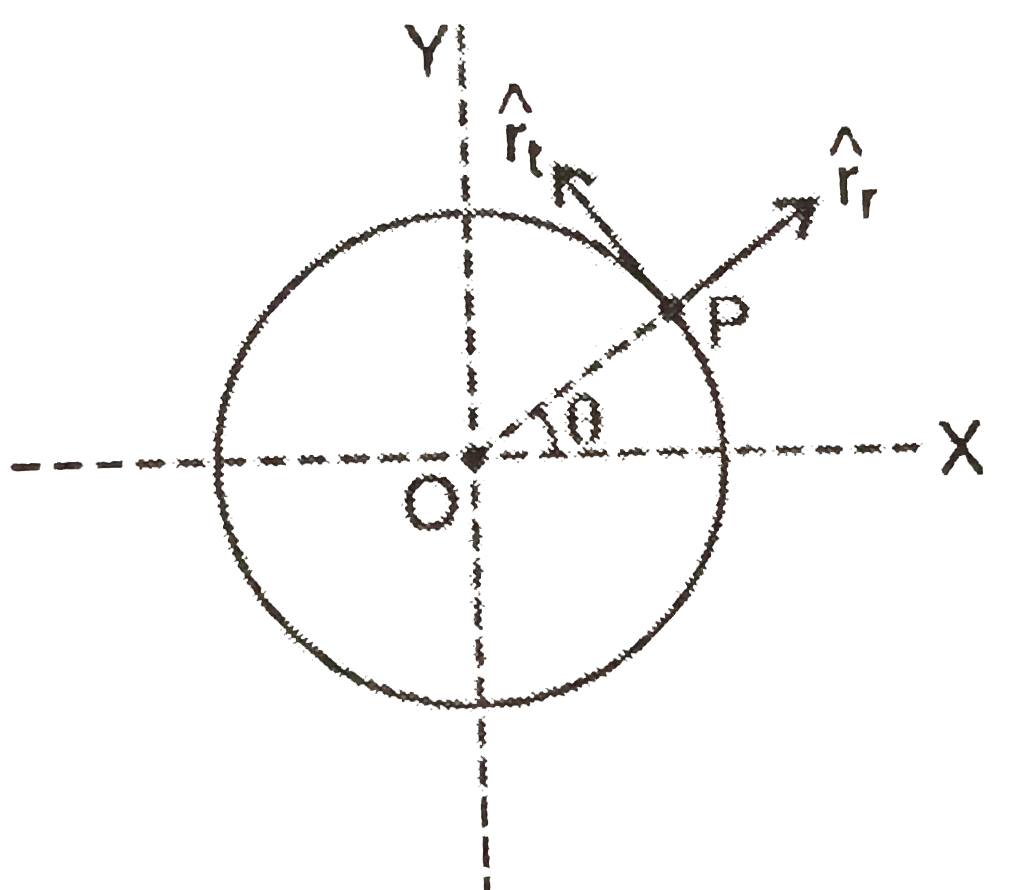
Consider a point object of mass 'm' moving in a circle of radius a=1m. For any instantaneous position of the object, `theta` is the angle that the radial line joining the object and the centre makes with the position X-axis of a cartesian coordinate system with the centre of circle O as the origin. `hati` and `hatj` are unit vectors along X- axis and Y-axis, respectively . Suppose that the motion is a 'Unifrom Circular Motion ' with a constant angular speed `(pi)/(36) rad//sec` and that the sense of rotation is counterclockwise with ` theta = 0 at t = 0` . For an object which moves in a circle , it is usually convenient to introduce two mutually perpendicular unit vectors `hatr_(r)` and `hatr_(t)`, as shown in the fig 3.57. Here `hatr_(r)` is the radial unit vector and `hatr_(t)` , the tangential unit vector.
Answer the following questions :
In trems of `hatr_(r), hatr_(t)` and `theta, hati` can be expressed as :