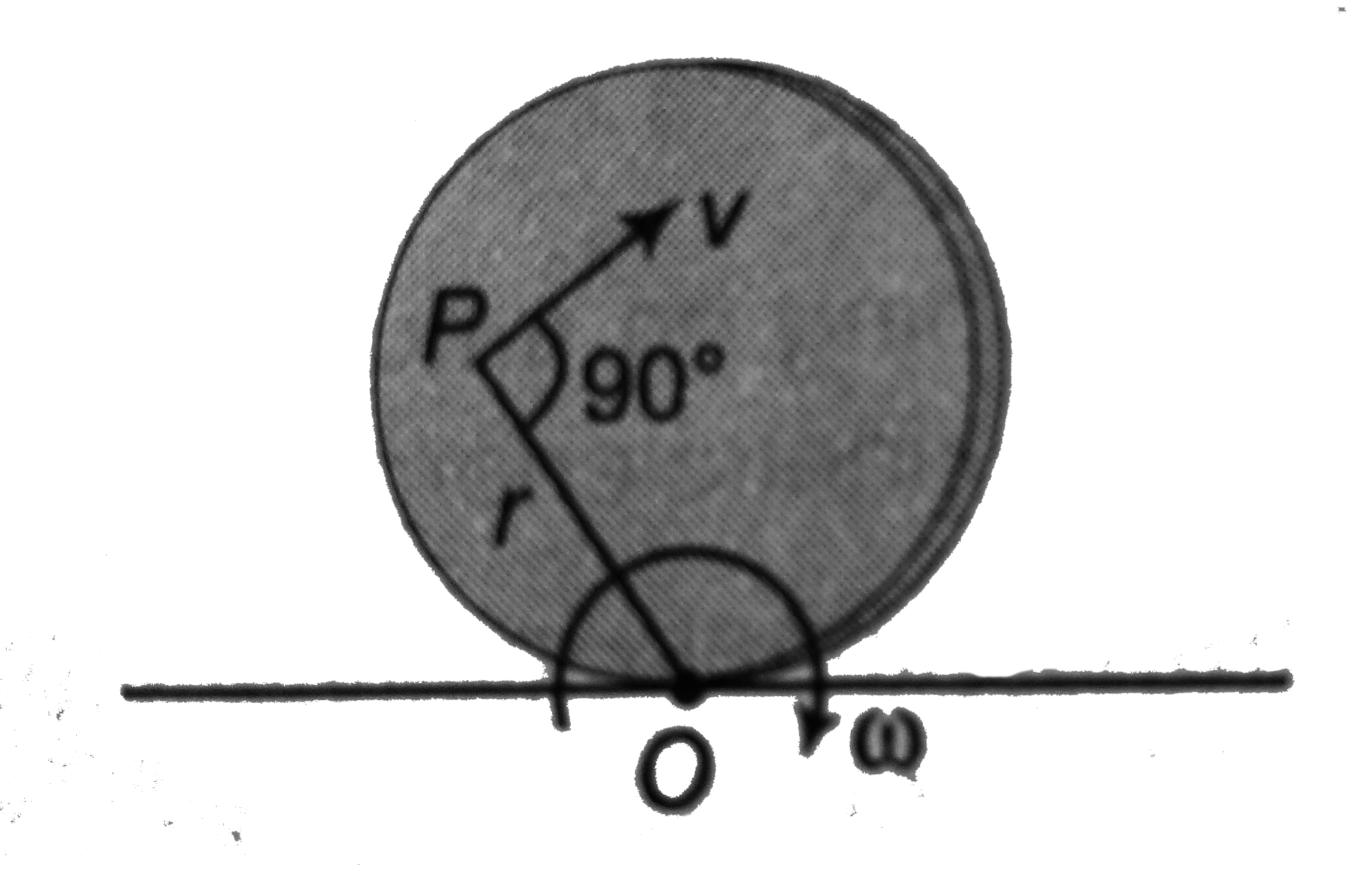
In pure rolling, combined rotation and translation motion may be assumed to be a pure rotational motion about an axis passing through bottommost point (with same `omega`) or instantaneous axis of rotation
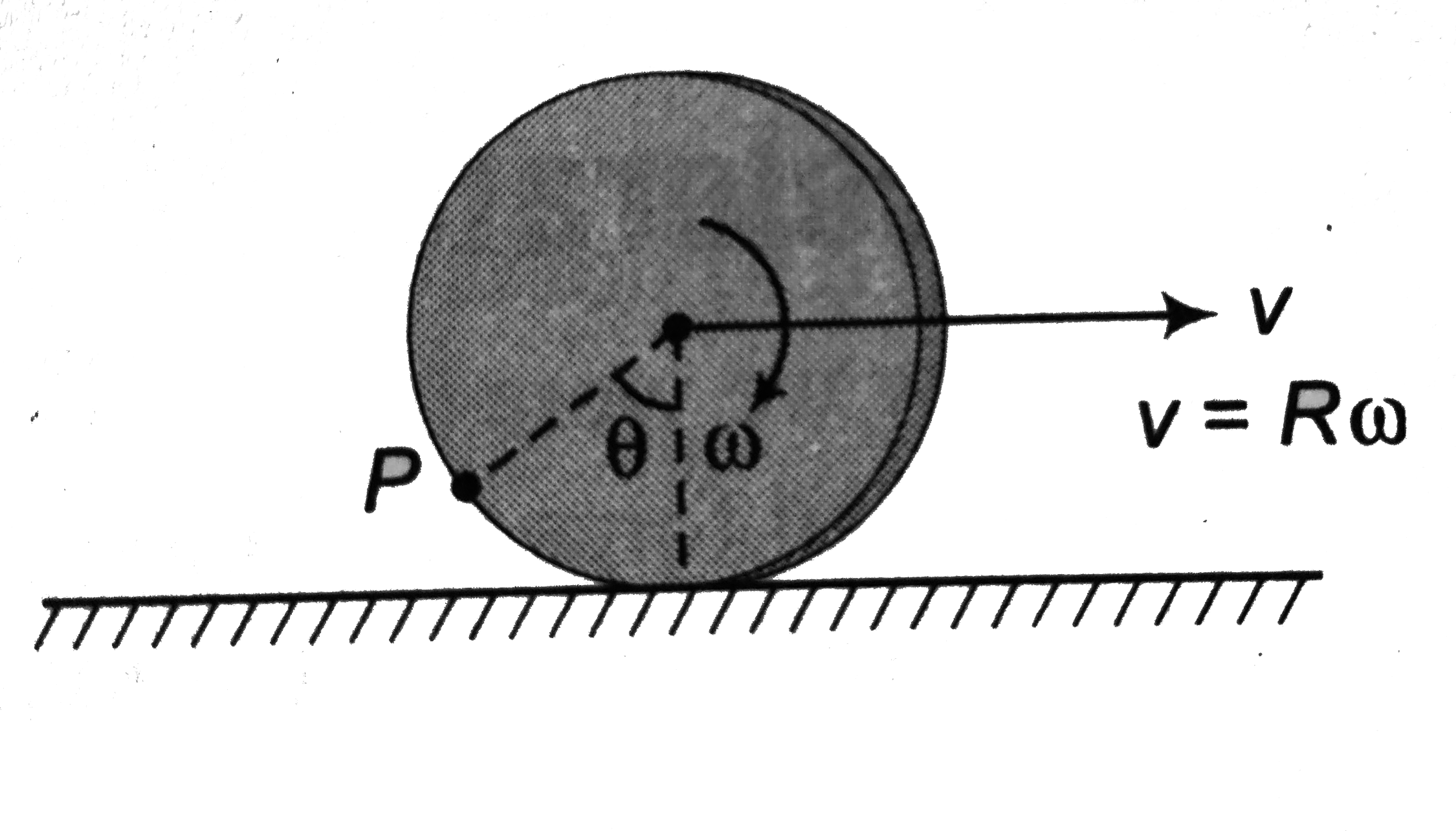
`|V_(P)|=(OP)omega` here `OP=2Rsin((theta)/(2))`
`therfore|V_(P)|=(2Rsin((theta)/(2))omega=2Romegasin((theta)/(2))=2vsin((theta)/(2))`