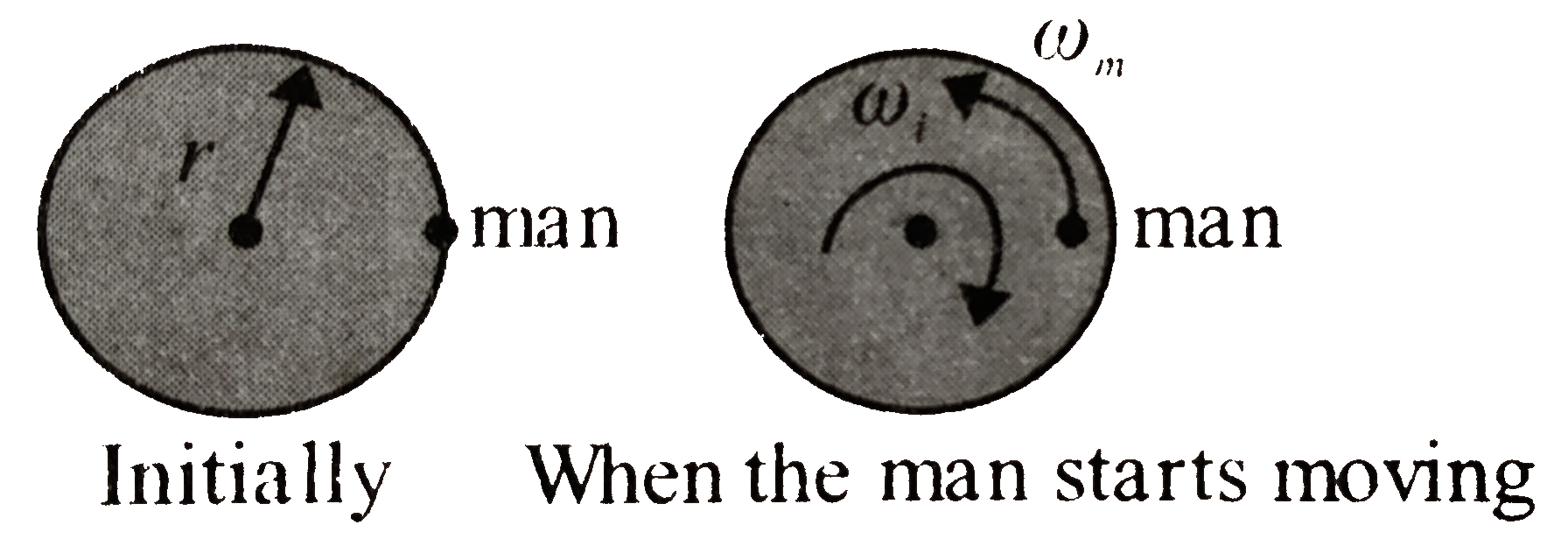
As for the man and table system, initial angular momentum is zero and it will remain zero as no external torque about rotation axis. When the man starts moving in the anticlockwise direction to make angular momentum zero, the table will start rotating in the clockwise direction.
a. By conserving of angular momentum on the man -table system
`L_(i)+L_(f)`
`implies0+0=I_(m)omega_(m)+I_(t)omega_(t)`
`impliesomega_(t)=(-I_(m)omega_(m))/I_(r)`, where `omega_(m)=v/r=1/2rad//s`
`=(100(2)^(2)xx(1/2))/4000`
(negative sign represents clockwise direction)
`impliesomega_(m)=v/r=1/2rad//simpliesomega_(t)=-1/20rad//s`
Thus, the table rotates clockwise (opposite to the man) with angulr velocity `0.05 rad//s`.
b. If the man completes one revolution relative to the table. Angular displacement of the man w.r.t table is
`theta_(mt)=2piimplies2pi=theta_(m)-theta_(t)`
`2pi=omega_(m)t-momega_(r)t` (where `t` is the time taken)
`t=(2pi)/(omega_(m)-omega_(t))=(2pi)/(0.5-(-0.05))=(2pi)/0.05`
`implies` Angular displacement of table is
`theta_(t)=omega_(t)t=0.05xx((2pi)/0.55)=-((2pi)/11)rad`
The table rotates through `2pi//11` rad clockwise.
c.If the man completes one revolution relative to the earth, then
`theta_(m)=2pi`
Time`=2pi/omega_(m)=((2pi)/0.5)`
During this time, angular displacement of the table
`theta_t=omega_t(time)=-0.05xx((2pi)/0.5)`
`=-pi/5radians =36^@ ` clockwise direction


