A solid cylinder of mass `M` and radius `R` rolls without slipping down an inclined plane of length `L` and height `h`. What is the speed of its center of mass when the cylinder reaches its bottom
A solid cylinder of mass `M` and radius `R` rolls without slipping down an inclined plane of length `L` and height `h`. What is the speed of its center of mass when the cylinder reaches its bottom
Text Solution
Verified by Experts
First method: "Force/Torque" Method
We can use the formula which we derived
`a=(gsintheta)/(1+(k^(2))/(R^(2)))`……..i
For cylinder `I=(mR^(2))/2impliesk^(2)=(R^(2))/2`
Hence, acceleration of the cylinder `a=2/3gsintheta`
Let `v_(CM)` be the velocity of the centre of mas at the bottom. From equation `v^(2)=u^(2)+2as`,
`v_(CM)^(2)=0^(2)+2(2/3gsintheta)(h/(sintheta))=4/3gh`
`implies v_(CM)=sqrt(4/3gh)`
Second method: By Mechanical Energy Conservation
When the non conservative forces do not perform ay work on a system `(W_("nef")=0)`, the mechanical energy`(K+U)` of the system remains constant.
Here `W_(f)=0`(because the velocity of the instantaneous point of contact is always zero)
`W_(N)=0`(because the velocity of the instantaneous point of contact is always zero)
Thus, `W_("nef")=0`
The mechanical energy of the cylinder will remain constant.
`(K+U)_("top")=(K+U)_("bottom")`
`implies 0+mgh=1/2mv_(CM)^(2)+1/2I_(CM)omega^(2)+0`
`=1/2mv_(CM)^(2)+1/2(1/2mr^(2))((v_(CM))/r)^(2)`
`(v_(CM)=romega, ` for rolling)
`=1/2 mv_(CM)^2+1/4mv_(CM)^(2)impliesmgh=3/4 mv_(CM)^(2)`
`implies v_(CM)=sqrt(4/3gh)`
Third Method: Using work energy Theorem `(SigmaW=/_\K)`
`W_(f)+W_(N)+W_(mg)=K_(2)-K_(1)`
`implies 0+0+(mg)h=(1/2mv_(CM)^(2)+1/2I_(CM)omega^(2))`
`implies mgh=1/2mv_(CM)^(2)impliesmgh=3/4mv_(CM)^(2)`
`implies v_(CM)=sqrt(4/3gh)`
Fourth Method: Using work Ennergy Theorem Separately in Translational Motion and Rotational Motion
The rolling motioin of the cylinder is obtained by superimposing the translation and rotational motions, translational motion of the centre of mass and rotational motion about an axis passing through the centre of mass, cylinder's own axis.
you can apply the work energy theorem for the translational and rotatioinal components of the motion separately as under:
`SigmaW_("force")=/_\K_("translation")`
and. `SigmaW_("torque")=(/_\K_("rotational"))`
The two forces acting at the point of contact, `f_(s)` and `N` can be translated to the centre of mass after applying an equivalent torque as shown in figure.
For the translational part of the motion.
`W_(f)+W_(N)+W(mg)=K_(2)-K_(1)`
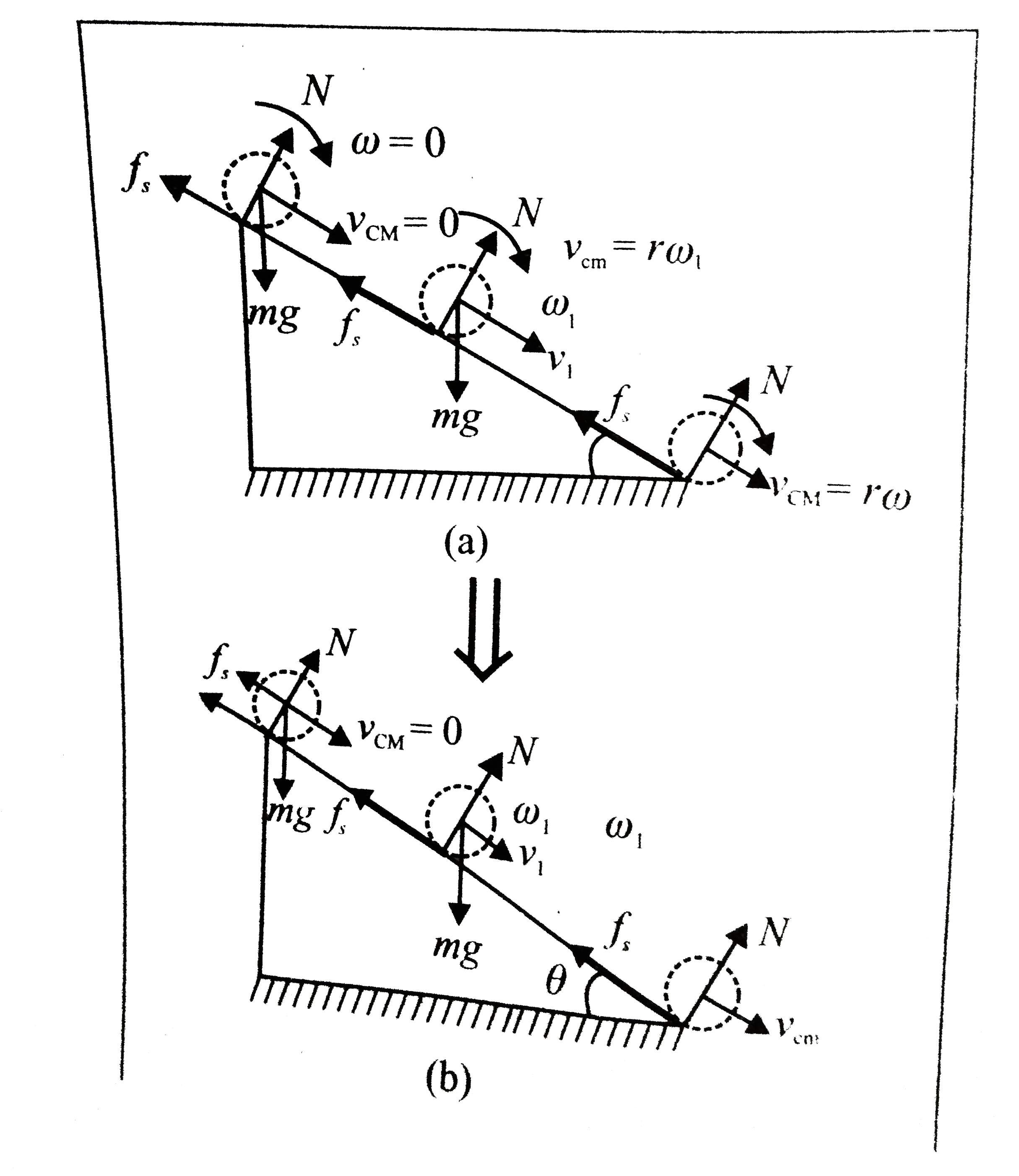
`implies -f_(s)(h/(sintheta))+0+h=1/2mv+(CM)^(1)-0`
For the rotational part,
Torque `xx` Angular displacement `=1/2I_(CM)omega^(2)-0`
` implies (f_(s).r)((h/sintheta)/r)=1/2I_(CM)omega^(2)-0`
`(Wtau=tautheta)` is `tau` is contant and `theta_(1)` and `tau` are in the same sense of rotation where `theta_(1)` is the angle through which the cyinder rotates about the centre of mass axis. Here, for rolling, `v_(CM)=romegas, a_(CM)=ralpha` and `s=rtheta_(1))`
Thus `f_(s)(h/(sintheta))=1/2I_(CM)omega^(2)`
From the above equations, we get
`mgh=1/2mv_(CM)^(2)+1/2I_(CM)+omega_(CM)^(2)`
`=3/4mv_(CM)^(2)+, I_(CM)=1/2mr^(2)`
`implies v_(CM)=sqrt(4/3gh)`
Fifth method:
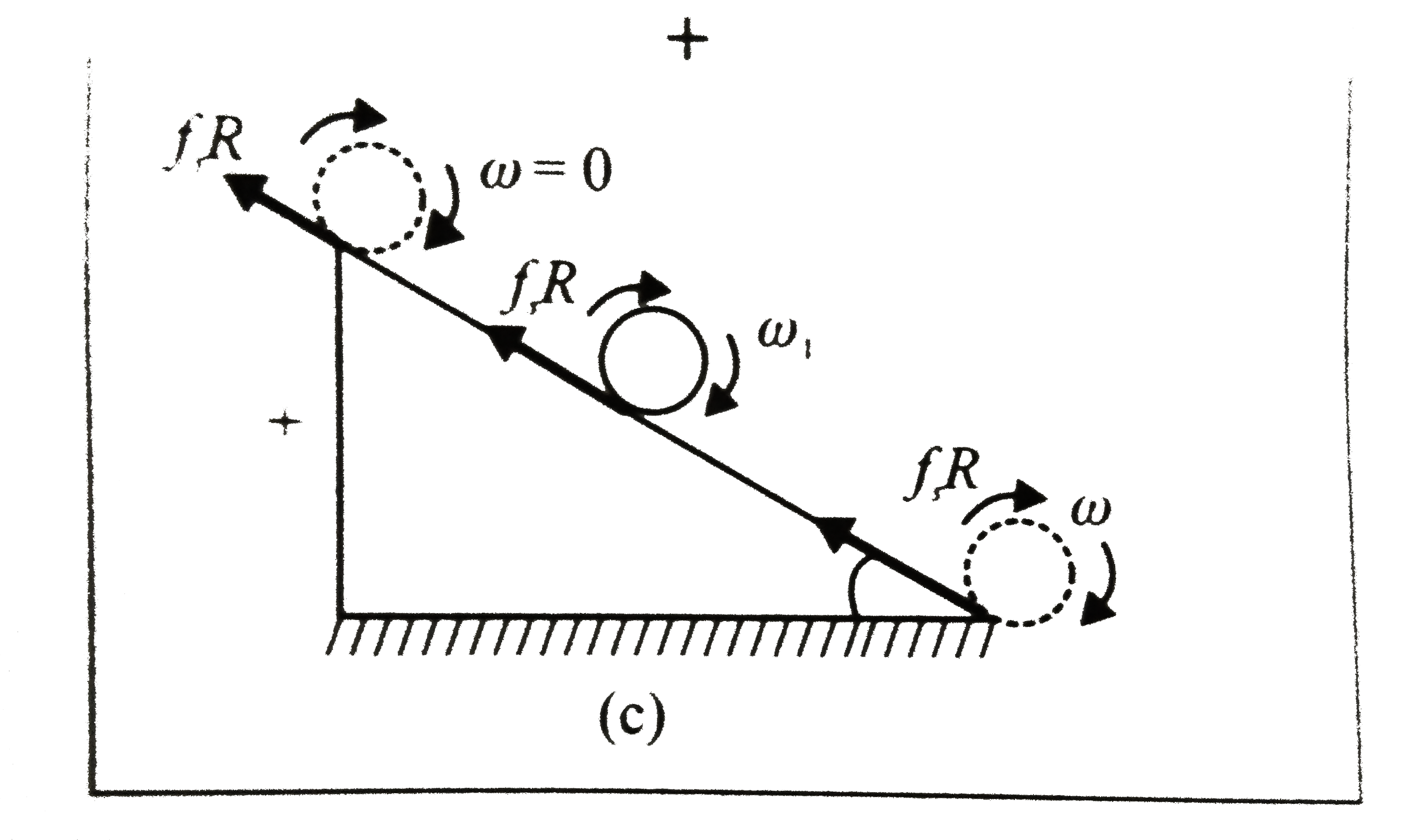
About the instantaneous point of contact, the torque acting on the cylinder is
`(vectau=f_(s)xx0+N)+(mg)(rsintheta)`
`=mg r sintheta (-hatk)(clockwise)`
Angular momentum of the cylinder about the instantaneous point of contact in the clockwise sense,
`vecL=[I_(CM)omega+mv_(CM)r](-hatk)`
`[(1/2mr^(2))(v_(CM)/r)+mv_(CM)r](-hatk)=3/2mrv_(CM)(-hatk)`
now, from the equation `vectau=(vec(dL))/(dt),`
`mgrsinthetas=d/(dt)(3/2mrv_(CM))`
Here `vecrtau=vec(dL)/dt` has been applied about the instantaneous point of contact).
`implies mgrsintheta3/2 mr (dv_(CM))/(dt)=3/2mra_(CM)`
`implies a_(CM)=3/2gsintheta`
Now from the equation `v^(2)=u^(2)+2as,` we get
`v_(CM)^(2)=0^(2)+2(2/3gsintheta)(h/(sintheta))`
`implies v_(CM)=sqrt(4/3gh)`
Alternative Method: You can also manipulate Eqn i as follows
`mgrsitheta=d/(dt) (3/2mrv_(CM))`
`gsintheta=3/2 (dv_(CM))/(dt)=3/2 (dv_(CM))/(dx)(dx)/(dt)=3/2v_(CM)(dv_(CM))/(dx))`
`implies g sintheta dx=3/2v_(CM)dv_(CM)`
`int_(0)^(h//sintheta) g sintheta dx =int_(0)^(v_(CM)) 3/2v_(CM) dv_(CM)`
`implies gh=3/4v_(CM)^(2)impliesv_(CM)=sqrt(4/3gh)`
We can use the formula which we derived
`a=(gsintheta)/(1+(k^(2))/(R^(2)))`……..i
For cylinder `I=(mR^(2))/2impliesk^(2)=(R^(2))/2`
Hence, acceleration of the cylinder `a=2/3gsintheta`
Let `v_(CM)` be the velocity of the centre of mas at the bottom. From equation `v^(2)=u^(2)+2as`,
`v_(CM)^(2)=0^(2)+2(2/3gsintheta)(h/(sintheta))=4/3gh`
`implies v_(CM)=sqrt(4/3gh)`
Second method: By Mechanical Energy Conservation
When the non conservative forces do not perform ay work on a system `(W_("nef")=0)`, the mechanical energy`(K+U)` of the system remains constant.
Here `W_(f)=0`(because the velocity of the instantaneous point of contact is always zero)
`W_(N)=0`(because the velocity of the instantaneous point of contact is always zero)
Thus, `W_("nef")=0`
The mechanical energy of the cylinder will remain constant.
`(K+U)_("top")=(K+U)_("bottom")`
`implies 0+mgh=1/2mv_(CM)^(2)+1/2I_(CM)omega^(2)+0`
`=1/2mv_(CM)^(2)+1/2(1/2mr^(2))((v_(CM))/r)^(2)`
`(v_(CM)=romega, ` for rolling)
`=1/2 mv_(CM)^2+1/4mv_(CM)^(2)impliesmgh=3/4 mv_(CM)^(2)`
`implies v_(CM)=sqrt(4/3gh)`
Third Method: Using work energy Theorem `(SigmaW=/_\K)`
`W_(f)+W_(N)+W_(mg)=K_(2)-K_(1)`
`implies 0+0+(mg)h=(1/2mv_(CM)^(2)+1/2I_(CM)omega^(2))`
`implies mgh=1/2mv_(CM)^(2)impliesmgh=3/4mv_(CM)^(2)`
`implies v_(CM)=sqrt(4/3gh)`
Fourth Method: Using work Ennergy Theorem Separately in Translational Motion and Rotational Motion
The rolling motioin of the cylinder is obtained by superimposing the translation and rotational motions, translational motion of the centre of mass and rotational motion about an axis passing through the centre of mass, cylinder's own axis.
you can apply the work energy theorem for the translational and rotatioinal components of the motion separately as under:
`SigmaW_("force")=/_\K_("translation")`
and. `SigmaW_("torque")=(/_\K_("rotational"))`
The two forces acting at the point of contact, `f_(s)` and `N` can be translated to the centre of mass after applying an equivalent torque as shown in figure.
For the translational part of the motion.
`W_(f)+W_(N)+W(mg)=K_(2)-K_(1)`
`implies -f_(s)(h/(sintheta))+0+h=1/2mv+(CM)^(1)-0`
For the rotational part,
Torque `xx` Angular displacement `=1/2I_(CM)omega^(2)-0`
` implies (f_(s).r)((h/sintheta)/r)=1/2I_(CM)omega^(2)-0`
`(Wtau=tautheta)` is `tau` is contant and `theta_(1)` and `tau` are in the same sense of rotation where `theta_(1)` is the angle through which the cyinder rotates about the centre of mass axis. Here, for rolling, `v_(CM)=romegas, a_(CM)=ralpha` and `s=rtheta_(1))`
Thus `f_(s)(h/(sintheta))=1/2I_(CM)omega^(2)`
From the above equations, we get
`mgh=1/2mv_(CM)^(2)+1/2I_(CM)+omega_(CM)^(2)`
`=3/4mv_(CM)^(2)+, I_(CM)=1/2mr^(2)`
`implies v_(CM)=sqrt(4/3gh)`
Fifth method:
About the instantaneous point of contact, the torque acting on the cylinder is
`(vectau=f_(s)xx0+N)+(mg)(rsintheta)`
`=mg r sintheta (-hatk)(clockwise)`
Angular momentum of the cylinder about the instantaneous point of contact in the clockwise sense,
`vecL=[I_(CM)omega+mv_(CM)r](-hatk)`
`[(1/2mr^(2))(v_(CM)/r)+mv_(CM)r](-hatk)=3/2mrv_(CM)(-hatk)`
now, from the equation `vectau=(vec(dL))/(dt),`
`mgrsinthetas=d/(dt)(3/2mrv_(CM))`
Here `vecrtau=vec(dL)/dt` has been applied about the instantaneous point of contact).
`implies mgrsintheta3/2 mr (dv_(CM))/(dt)=3/2mra_(CM)`
`implies a_(CM)=3/2gsintheta`
Now from the equation `v^(2)=u^(2)+2as,` we get
`v_(CM)^(2)=0^(2)+2(2/3gsintheta)(h/(sintheta))`
`implies v_(CM)=sqrt(4/3gh)`
Alternative Method: You can also manipulate Eqn i as follows
`mgrsitheta=d/(dt) (3/2mrv_(CM))`
`gsintheta=3/2 (dv_(CM))/(dt)=3/2 (dv_(CM))/(dx)(dx)/(dt)=3/2v_(CM)(dv_(CM))/(dx))`
`implies g sintheta dx=3/2v_(CM)dv_(CM)`
`int_(0)^(h//sintheta) g sintheta dx =int_(0)^(v_(CM)) 3/2v_(CM) dv_(CM)`
`implies gh=3/4v_(CM)^(2)impliesv_(CM)=sqrt(4/3gh)`



Topper's Solved these Questions
Similar Questions
Explore conceptually related problems
A solid cylinder of mass M and radius R rolls without slipping down an inclined plane making an angle 6 with the horizontal. Then its acceleration is.
A solid cylinder of mass M and radius R rolls down an inclined plane of height h without slipping. The speed of its centre when it reaches the bottom is.
A solid cylinder is rolling without slipping down an inclined plane. Then its angular momentum is :
A solid cylinder of mass M and radius R rolls without slipping on a flat horizontal surface. Its moment of inertia about the line of contact is ?
A solid cylinder of mass m and radius r starts rolling down an inclined plane of inclination theta . Friction is enough to prevent slipping. Find the speed of its centre of mass when its centre of mass has fallen a height h .